화성 로버 : 퍼서비어런스에 관한 질문들
NASA의 퍼서버런스 로버는 지구에서 약 7개월 동안의 여정 끝에 화성 표면에 도달해 있습니다. 여기서 미션에 관한 몇 가지 일반적인 질문에 답변하겠습니다.
로버는 무엇을 하게 되나요?
퍼서버런스 로버는 2021년 2월 18일 목요일 20:55 GMT (15:55 ET)에 화성 표면에 착륙했습니다.
이 로봇은 과거 미생물 생명의 흔적을 찾기 위해 설계되었습니다, 그렇다면 그것이 실제로 존재했다면요. 이는 1970년대 바이킹 미션 이후에 처음으로 이러한 "생명의 흔적"을 직접 찾기 위한 NASA 미션입니다.
로버는 암석과 토양 샘플을 수집하고 그것들을 튜브에 담아 미래의 어느 날에 지구로 반환하기 위해 행성 표면에 남겨둘 것입니다. 퍼서버런스는 또한 화성의 지질을 연구하고 미래의 화성 미션에서 우주 비행사가 대기 중의 이산화탄소(CO2)에서 산소를 생산하는 방법을 테스트할 것입니다. 이 산소는 호흡 및 로켓 추진제로 사용될 수 있습니다.
또한 드론과 비슷한 헬리콥터가 화성에서 최초로 동력 비행을 시연하기 위해 배치될 것입니다. 퍼서버런스는 적도에 가까운 행성의 제제로 크레이터를 최소한 하나의 화성 해 (지구에서 약 687 일) 동안 탐험할 것입니다.
어떻게 화성에 도착했나요?
퍼서버런스는 2020년 7월 30일에 플로리다의 케이프 카나베랄에서 발사되었습니다. 이 1톤짜리 차 크기의 로버는 두 부분으로 이루어진 보호용 에어로쉘에 싸여 우주를 여행했습니다. 이 에어로쉘은 원뿔 모양의 백쉘과 열 차단판으로 이루어져 있었습니다.
에어로쉘은 우주선을 목표 지점으로 정확히 도착하도록 유도하기 위해 항로를 유지하는데 필요한 추진기를 가진 크루즈 스테이지에 연결되었습니다. 이렇게 하여 화성 착륙을 위해 올바른 장소에 도착할 수 있도록 보장되었습니다.
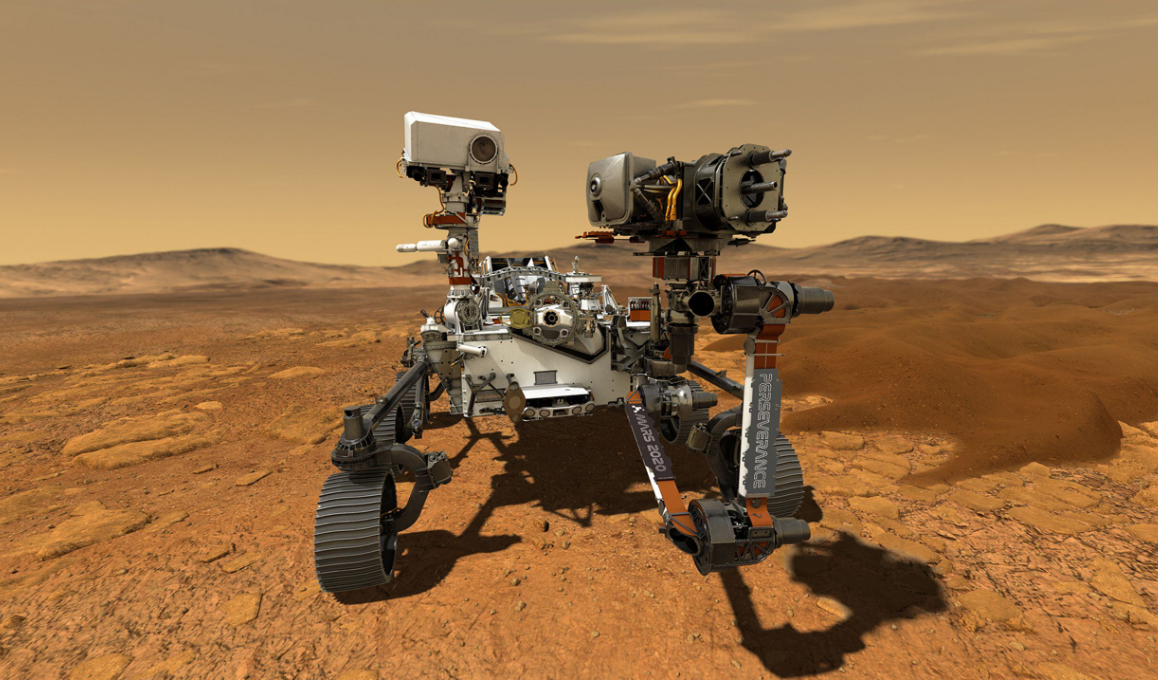
퍼서비어런스 로버의 기술 스펙은 어떻게 되나요?
길이: 3미터 (10피트)
폭: 2.7미터 (9피트)
높이: 2.2미터 (7피트)
무게: 1,025킬로그램 (2,260파운드)
파워소스: 다목적 무선동위원소 열전발전기(Multi-Mission Radioisotope Thermoelectric Generator, MMRTG). 플루토늄의 방사능 붕괴로부터 발생하는 열을 전기로 변환합니다.
퍼서비어런스는 어떻게 착륙했는가?
지구로부터 4억 7,000만 킬로미터의 여정을 마친 이 우주선은 화성의 대기를 관통했습니다. 이 단계에서 열차단판은 최고 2,100도(Celsius)의 고온을 견뎌야 했습니다.
우주선이 지상에서 약 11킬로미터(7마일) 떨어진 곳에서 우주선은 낙하산을 배치하여 화성 탐사 역사상 가장 무거운 페이로드의 속도를 Mach 1.7 (2,099 km/h 또는 1,304 mph)에서 약 320 km/h (200 mph)로 늦추었습니다.
그 후 열차단판은 백쉘에서 분리되고, 단기간 동안에 로버는 하강 스테이지에 연결된 채로 자유롭게 지상으로 떨어졌습니다.
하강 스테이지의 8개의 후진 로켓이 작동하여 "하늘 크레인" 작업을 수행할 수 있도록 했습니다. 퍼서버런스는 나일론 줄과 "유모도 선"을 통해 천천히 내려가고 있었습니다. 로버의 바퀴가 지상에 닿으면 줄이 끊어지고 하강 스테이지는 안전한 거리로 날아갔습니다.
화성의 어떤 곳을 탐험할 것인가?
로버의 착륙 지점인 제제로 크레이터는 화성 적도의 북쪽에 위치한 지름 49킬로미터(30마일)의 충격 분진입니다. 과학자들은 35억 년 전 이상 전에 강이 제제로의 벽을 넘어 호수를 형성하기 위해 흘러나온 것으로 추정합니다.
이 큰 홈은 또한 강이 개방된 물체에 들어가 바위, 모래 및 잠재적으로 유기 탄소를 층으로 쌓을 때 형성되는 퇴적 구조 중 화성에서 가장 잘 보존된 사례 중 하나입니다.
물이 있을 때 미생물이 크레이터에 살 수 있었을 것입니다. 제제로는 충격 크레이터 형성 및 화산 활동과 같은 중요한 지질 과정과 물의 작용을 보존하고 있으며, 그 바위를 연구함으로써 이 행성이 시간이 흐름에 따라 어떻게 진화했는지에 대한 통찰력을 제공할 것입니다.
로버는 화성에서 과서 생명체 흔적을 어떻게 찾을까요?
제제로의 부채형 델타는 과거 생명의 흔적을 찾기 위한 주요 대상 중 하나입니다. 또한 크레이터 해안에 카보네이트 광물이 침전되어 욕조의 환상 같은 곳에 링처럼 형성되어 있습니다. 물에서 카보네이트가 침전되면, 생명의 영향을 받아 형성된 것을 포함하여 함유물을 포획할 수 있습니다. "우리는 생명의 영향을 받아 형성되는 패턴, 질감 또는 물질을 찾을 것입니다,"라고 부 프로젝트 과학자 케이티 스택 모건 박사가 말합니다.
우리는 어떤 형태로서의 화성 생명의 흔적을 알지 못하지만, 고대 지구는 단서를 제공할 수 있습니다. 지구 초기 생명의 기록은 원래 박테리아의 층 층 증식으로 형성된 석류암인 스트로마톨라이트에서 찾을 수 있습니다. 만약 화성에 유사한 구조물이 존재한다면, 과학자들은 다양한 기기에서 얻은 측정값을 결합하여 생물학적 기원의 가능성을 평가할 수 있을 것입니다.
왜 과학자들은 화성에서 그 곳에 생명체가 있을 것이라 생각하나요?
오늘날 화성은 추운 곳이며, 얇은 대기로 인해 표면이 우주 복사선의 해로운 수준에 노출되는 건조한 행성입니다. 그러나 수십 억 년 전에는 행성이 더 습하고 두꺼운 대기를 가졌을 것으로 보입니다. 진흙암과 퇴적층과 같은 다양한 증거들이 한때 표면에 액체 물이 존재했다는 것을 보여줍니다.
이것은 지구 상의 모든 생명에게 필수적인 물이라는 중요한 재료이기 때문입니다. 또한 호기심 로버는 30억 년 전에 형성된 퇴적암에서 보존된 유기 물질을 발견했습니다. 이것은 유망한 발견이지만, 이러한 유기 물질이 고대 생명의 기록을 보존했는지, 그들의 식품이었는지 아니면 생물학적 과정과 아무 상관이 없는 것인지 여전히 명확하지 않습니다.
로버가 어떤 장비들을 지니고 다니나요?
퍼서비어런스는 화성의 지질, 대기, 환경 조건 및 잠재적인 생명의 흔적에 관한 정보를 수집하기 위한 과학 기기의 고급 페이로드를 운반하고 있습니다:
Mastcam-Z: 표면 광물을 연구하는 데 도움이 되는 고급 카메라 시스템
MEDA: 스페인에서 제작한 센서 스위트로 온도, 풍속 및 풍향, 압력, 습도 및 먼지를 측정합니다.
MOXIE: 화성 이산화탄소에서 산소를 생산하여 숨쉬고 연료로 사용하는 우주 비행사들이 어떻게 생산할 수 있는지 실험합니다.
PIXL: 화학 원소를 식별하는 X-선 분광계와 암석 및 토양 질감을 가까이서 촬영하는 카메라를 갖추고 있습니다.
RIMFAX: 노르웨이에서 제작한 지하 지질을 센티미터 단위로 매핑하는 지상 관통 레이더입니다.
SHERLOC: 분광계, 레이저 및 카메라를 사용하여 물에 의해 변경된 유기물과 광물을 찾기 위한 목적으로 사용됩니다.
SuperCam: 카메라, 레이저 및 분광계를 사용하여 암석과 토양을 조사하여 유기 화합물을 찾을 것입니다.
화성에서 왜 헬리콥터를 날리나요?
인지뉴어티는 퍼서비어런스의 배꼽 부분에 부착되어 화성로 날아갈 1.8kg(4lb)짜리 헬리콥터입니다. NASA는 화성의 얇은 대기에서 동력 비행을 시연하고자 합니다. 화성의 중력은 지구의 약 1/3 정도로 낮지만, 그 대기는 지구 대비 약 1%밖에 되지 않습니다. 이로 인해 필요한 양의 양력을 발생하는 것이 훨씬 어려워집니다.
이 자율 헬리콥터는 두 개의 상반대로 회전하는 날개를 장착하고 있으며, 13메가픽셀 카메라로 컬러 이미지를 촬영할 수 있습니다. 회전날개를 가진 항공기는 다른 세계를 탐사하는 데 유용할 수 있습니다. 항공기는 지상 기반 로버보다 빠르게 이동하며 바퀴가 닿지 않는 지역에 도달할 수 있습니다.
이 로버와 큐리오시티(Curiosity) 간의 주요 차이점은 무엇인가요?
퍼서비어런스(Perseverance)는 전반적인 디자인 측면에서 전임자인 큐리오시티(Curiosity)와 매우 유사하지만 중요한 차이점이 있습니다. 새로운 과학 장비뿐만 아니라, 퍼서비어런스는 로봇 팔의 끝에 더 큰 "손" 또는 터렛을 가지고 있어 더 무거운 도구 세트를 들 수 있습니다. 이 터렛에는 코어링 드릴과 같은 도구들이 포함되어 있습니다.
샘플을 저장하기 위한 시스템 또한 새로운 기능입니다. 엔지니어들은 로버의 바퀴를 내구성이 더 강하도록 재설계하여 예리하고 뾰족한 바위를 통과하면서 생길 수 있는 손상을 최소화하려고 노력했습니다. 큐리오시티의 바퀴는 예리하고 뾰족한 바위를 지나다니며 손상을 입었던 적이 있습니다.
로버가 어떻게 토양과 암석을 저장하나요?
로버의 샘플 캐싱 시스템은 세 개의 로봇 구성 요소로 이루어져 있습니다. 가장 눈에 띄는 것은 로버의 샤시에 볼트로 고정된 2.1m(7ft) 길이의 다섯 개의 관절로 이루어진 로봇 팔입니다. 이 팔의 터렛에는 로봇 팔의 회전 철퇴 드릴이 있어 화성 바위의 완전한 코어를 잘라냅니다. 이러한 코어는 마치 분필 조각 크기 정도로 되어 있으며, 이를 샘플 튜브에 넣습니다. 그런 다음 주로 사용되는 로봇 팔은 채워진 튜브를 로버 전면에 있는 '비트 캐러셀'이라고 불리는 메커니즘에 놓습니다.
이 메커니즘은 1960년대 슬라이드 프로젝터를 연상시키며, 튜브를 로버 내부로 이동시켜 작은 0.5m(1.6ft) 길이의 샘플 핸들링 팔(또는 T. 렉스 팔이라고도 함)이 잡습니다. 튜브가 밀봉되고 보관함에 놓이기 전에 이미지가 촬영되며, 팀이 적절한 장소를 찾을 때까지 로버에서 운전됩니다.
화성에서의 채취된 샘플들은 어떻게 지구로 전달되나요?
수십 년 동안 과학자들은 화성 바위와 토양 샘플을 지구의 연구실에서 연구하기 위해 화성의 샘플을 지구로 전달하고 싶어했습니다. 여기서 과학자들은 화성으로 보낼 수 없는 크고 복잡한 기기로 샘플을 조사할 수 있을 것입니다. 퍼서비어런스는 밀봉된 튜브에 화성의 바위와 토양 샘플을 표면에 남겨 두는 것을 통해 이를 가능하게 하기 위한 기반을 마련하고 있습니다.
"Mars Sample Return"라는 프로그램의 일환으로, 별도의 미션이 화성에 착륙하여 "페치" 로버를 사용하여 튜브를 회수할 것입니다. 그런 다음 로봇 팔은 튜브를 페치 로버에서 "화성 상승 우주선" (Mars Ascent Vehicle, MAV)이라고 불리는 로켓으로 이전할 것입니다. 상승 우주선은 샘플을 화성 궤도로 던져, 그곳에서 궤도선에 잡히게 됩니다. 이 궤도선은 그런 다음 샘플 용기를 지구로 배송할 것으로 예상되며, 이는 2031년까지 가능할 것입니다